


Что такое робастность? Какое влияние она может оказывать на нашу жизнь? Как оптимизировать систему, не зная всех ее параметров? Можно ли управлять самолетом или автомобилем, если точно не знаешь, как и куда он направляется? Об этом рассказывает главный научный сотрудник и руководитель лаборатории Института проблем управления им. В.А. Трапезникова РАН, профессор РАН Михаил Владимирович Хлебников.
— Михаил Владимирович, как называется ваша лаборатория?
— Я имею честь руководить лабораторией № 7 «Адаптивных и робастных систем им. Я.З. Цыпкина» уже десять лет. В нашем институте все лаборатории имеют свои номера. Яков Залманович Цыпкин, основатель нашей лаборатории, возглавлял ее более 40 лет: с 1956 г. до своего ухода из жизни в 1997 г. Именно он заложил те направления исследований, которые и сейчас продолжают развиваться. Они видоизменяются, но общая направленность, которая была заложена основателем нашей лаборатории, остается неизменной. Я стараюсь сохранять эту преемственность, но также стараюсь соответствовать современным направлениям развития теории управления, следить за ее новейшими достижениями.
— Расскажите, что кроется под термином «робастность», неизвестным обывателю.
— В этом году, 2023-м, термину «робастность» исполняется 70 лет. Он появился в 1953 г. и изначально не имел никакого отношения к теории управления. Его ввел в употребление Джордж Бокс, статистик, который занимался вопросами «загрязненности» статистических распределений, тем, как строить модели, устойчивые к наличию выбросов в статистических данных. Поэтому долгое время этот термин использовался исключительно в рамках статистики.
Программа робастизации теории управления восходит к Я.З. Цыпкину. В классической теории предполагается, что мы имеем полную информацию о системе, которой мы собираемся управлять, что нам точно известны все ее параметры и характеристики. Но на самом деле так почти никогда не бывает: в реальных системах неизбежно присутствует неопределенность. Так вот, робастная теория, которая до сих пор продолжает вызывать огромный интерес исследователей во всем мире, занимается разработкой методов построения управления таким образом, чтобы оно выполняло поставленную задачу при том, что те или иные параметры системы мы знаем неточно. Иными словами, чтобы оно оставалось работоспособным при присущих ей неизбежных неопределенностях.
— Откуда появилось слово «робастность»?
— В буквальном переводе с английского языка оно означает «твердость», «крепкость» — здесь речь идет о невосприимчивости системы управления к изменениям ее параметров. Но, конечно, в разумных пределах. К этому примыкает еще такой вопрос: в задачах управления всегда приходится сталкиваться с неопределенностями. При этом если неопределенность сосредоточена в описании системы, мы имеем дело с проблемой робастности. Но иногда мы имеем дело с проблемой внешних возмущений. Представим себе летящий самолет, испытывающий на себе воздействие ветра, который может дуть с разной силой, менять свое направление. Могут быть неожиданные порывы ветра, что очень существенно, например, при посадке самолета... В этом случае перед нами встает задача подавления внешних возмущений: мы должны построить систему управления так, чтобы минимизировать воздействие возмущений.
Даже если мы имеем дело с совсем простыми механическими системами, в них также неизбежно присутствуют неопределенности: например, в жесткостях пружин, массах тел могут быть отклонения от изначально заданных. Что уж говорить про сложные системы, такие как самолет. Более того, ведь неопределенности могут присутствовать и в самих регуляторах. Это очень интересное направление, связанное с построением так называемых нехрупких регуляторов, которые должны выдерживать неопределенности в собственных параметрах.
— Что это значит?
— Дело в том, что техническая реализация регулятора неизбежно связана с появлением неточностей в его параметрах. Сейчас в нашей стране и мире порядка 90% промышленных регуляторов. Это так называемые ПИД-регуляторы, пропорционально-интегрально-дифференциальные регуляторы, которые настраиваются всего лишь по трем числовым параметрам. Так вот, уже довольно давно было показано, что даже малые изменения коэффициентов регулятора иногда могут привести к тому, что управление станет неудовлетворительным, система может даже потерять устойчивость. А может сохранить устойчивость, но совершенно неудовлетворительным образом выполнять те задачи, которые предполагал конструктор. Это явление и получило название хрупкости. Поэтому естественно задаваться вопросом: можно ли гарантировать, если регулятор будет в известных пределах отклоняться от идеального, вычисленного ручкой на бумаге или компьютером, чтобы он оставался работоспособным и выполнял свою задачу?
— И как это сделать?
— Оказывается, в рамках робастной теории можно ставить вопрос о построении таких регуляторов — теперь понятно, почему они называются «нехрупкими». Есть разные подходы к решению этой задачи. Один из них основан на технике линейных матричных неравенств и методе инвариантных эллипсоидов, позволяющих строить регуляторы, которые бы гарантированным образом выполняли сворю задачу.
Вот одна из книг на моем столе — «Управление линейными системами при внешних возмущениях: техника линейных матричных неравенств». У нее три соавтора, среди них, помимо меня, имя Бориса Теодоровича Поляка, моего учителя, старшего товарища, замечательного человека и выдающегося ученого. Он в течение 15 лет был заведующим этой лабораторией, а потом передал руководство ею мне. Научные заслуги Бориса Теодоровича совершенно необозримы. Достаточно сказать, что во многом именно его усилиями оптимизация сформировалась как отдельная, самостоятельная наука. К сожалению, в феврале этого года он ушел из жизни, но до сих пор продолжают выходить наши совместные публикации.
Эта книга вышла в 2014 г. и была удостоена премии им. Б.Н. Петрова президиума академии наук, так что она была высоко оценена научным сообществом. Как видно из ее названия, она посвящена вопросам управления линейными системами в условиях внешних возмущений — когда мы хотим управлять системой так, чтобы внешние возмущения оказывали как можно меньшее влияние на поведение системы. В ней есть и большая часть, которая посвящена в том числе робастной теории.
В монографии в качестве основного «инструмента» используется техника линейных матричных неравенств — это современная и прогрессивная техника, которая легко реализуется с вычислительной точки зрения и, как показывает практика, приводит к вполне работоспособным и отвечающим инженерным критериям качества регуляторам.
— С какими конкретно проблемами вам приходилось сталкиваться, решая эти задачи?
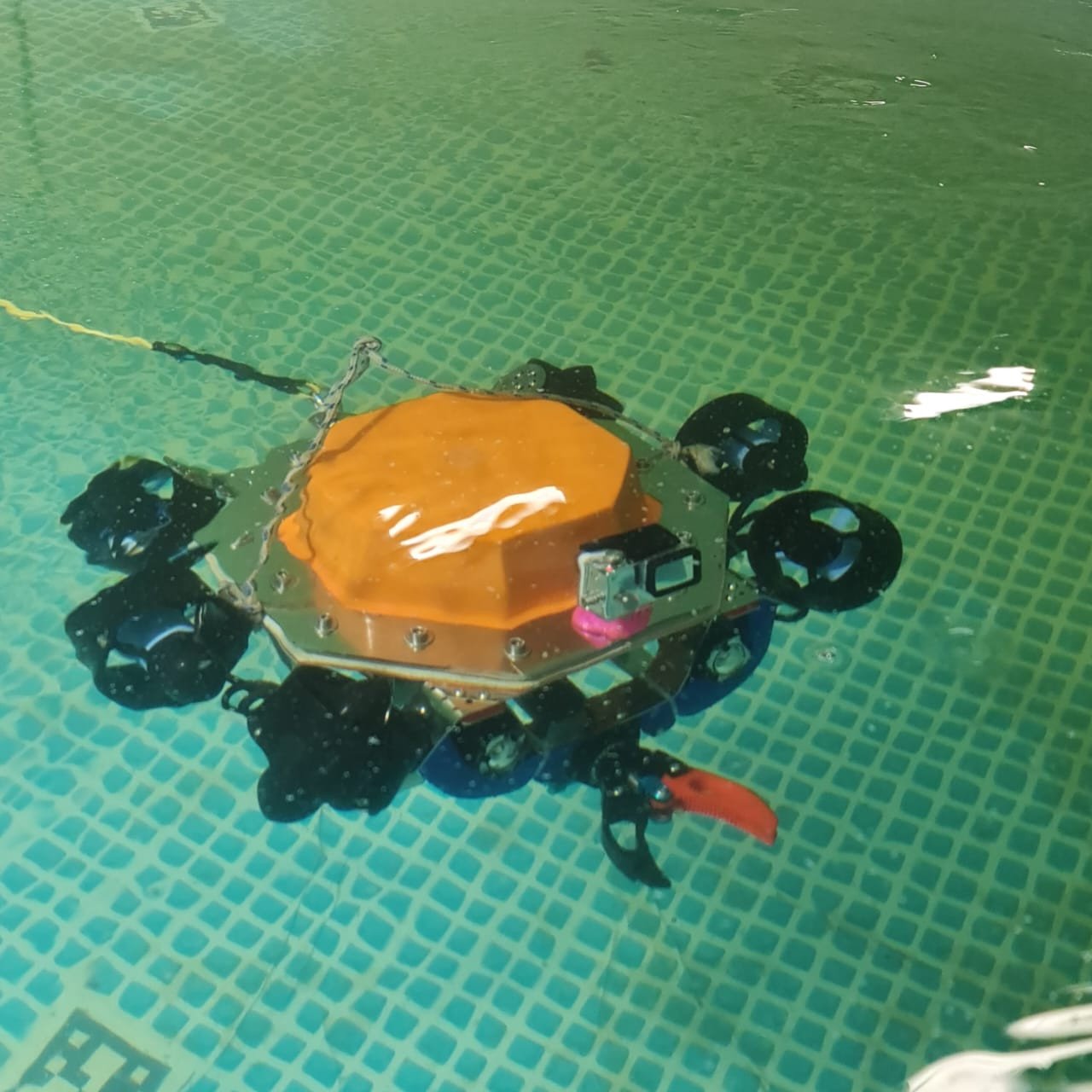
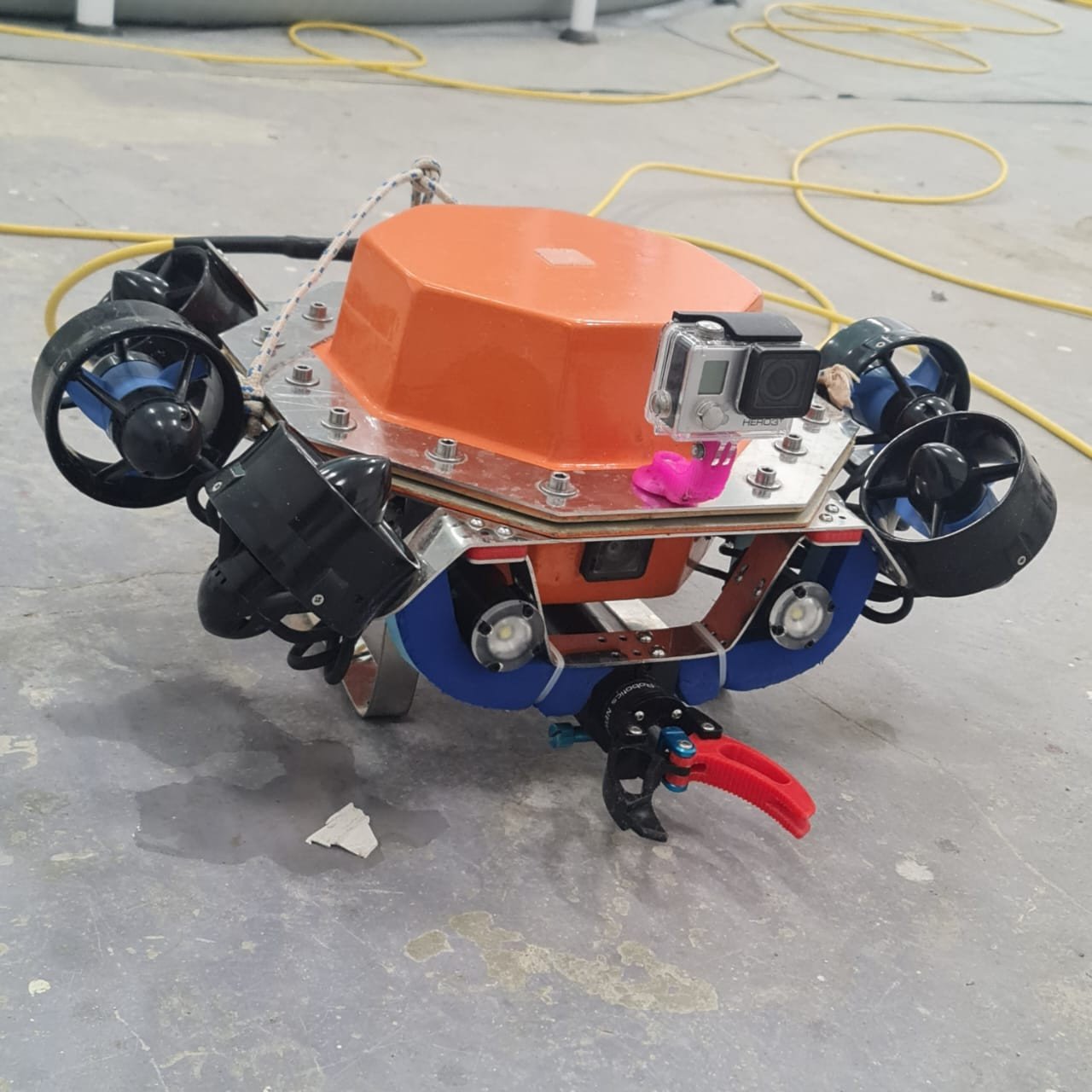
— Наша лаборатория — одно из основных теоретических подразделений института. Ее основная задача — следить за современными достижениями теории управления, предлагать свои подходы к решению соответствующих задач. Но при этом мы совершенно не чураемся принимать участие в прикладных разработках, хотя это скорее наша сопутствующая деятельность. Так что у нас есть немало и прикладных разработок. Из совсем недавних — разработка системы управления необитаемым подводным аппаратом, который может автономно плавать в водоемах.
— В каких же водоемах он плавает?
— Вы видели, конечно, наш институтский пруд? Изначально он представлял собой пруд-охладитель для ЭВМ, которая в свое время стояла у нас в институте и занимала несколько помещений. Потом необходимость в этом отпала, долгое время это был просто пруд, там даже рыба водится, с верхних этажей ее можно хорошо разглядеть.
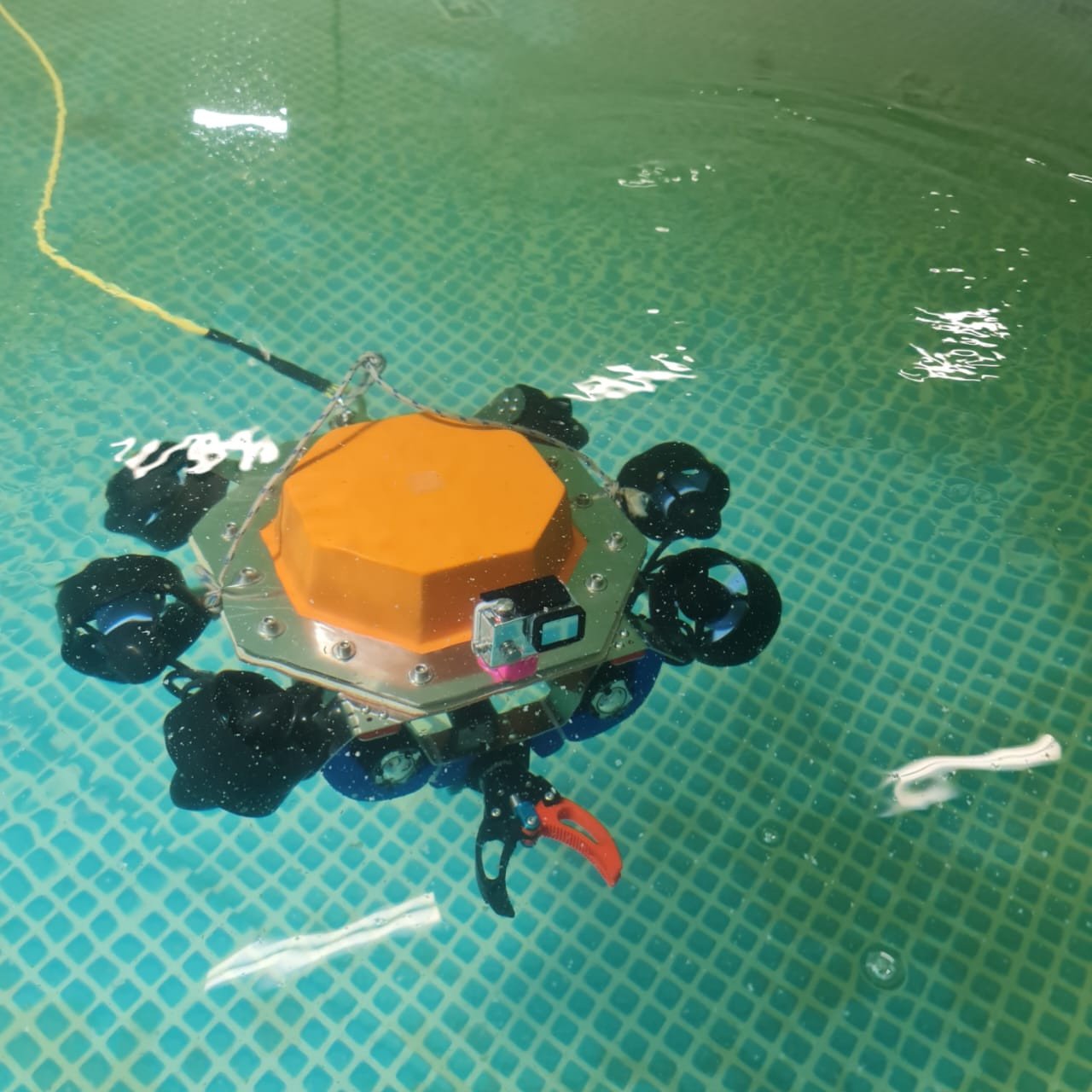
Вот именно в этом пруду, который сейчас представляет собой водный кластер нашего институтского робототехнического полигона, мы несколько дней назад и проводили испытания. Вообще, одна из основных задач этого аппарата — обследование водоемов, изучение водных экосистем, состояния дна, берегов. Все это можно делать в автоматическом режиме, но для этого требуется создание соответствующей системы управления, тех самых регуляторов, которые должны быть рассчитаны и на неопределенности в параметрах самого аппарата, и на возмущения, связанные с движением в реальной водной среде. Это очень интересная задача. Разработка системы управления подводным аппаратом — это межлабораторный проект, в нем задействованы несколько лабораторий нашего института, и наша в их числе.
— Какие же данные он вам предоставил?
— На аппарате укреплена видеокамера, которая, с одной стороны, позволяет видеть, что происходит под поверхностью водоема, снимать самые разные данные, а с другой — предоставляет обратную связь для управления самим подводным аппаратом. Вообще, эта деятельность потребовала привлечения всех наших наработок, нашего опыта. И, как показали результаты испытаний, которые прошли очень успешно, предложенные подходы оказались вполне работоспособными.
Иногда получается неожиданная обратная связь. В начале мая я получил письмо из компании «СберАвтоТех», это технологическая компания при Сбербанке, которая занимается разработкой беспилотного транспорта. Они написали мне, что, руководствуясь результатами монографии про управление при внешних возмущениях, им удалось успешно решить задачу управления боковым движением беспилотного автомобиля.

— Выходит, банкиры читают умные книги, а не только деньги считают?
— Да, и это меня очень порадовало. Они реализовали на практике метод синтеза регуляторов, который мы предложили, и он позволил им достичь желаемого результата. Они выразили нам свою признательность, что было очень неожиданно и приятно, тем более что мы никак не были вовлечены в этот процесс.
Вторая книга на моем столе — «Математическая теория автоматического управления», она была написана к 80-летию ИПУ РАН. В ней мы постарались в современной форме изложить основы математической теории автоматического управления. На эти темы есть довольно много разных учебников, монографий, но мы постарались написать ее так, чтобы она, с одной стороны, охватывала современные достижения, а с другой — была понятна студентам, инженерам, научным работникам. Она охватывает и вопросы робастной теории, и вопросы подавления внешних возмущений, а бóльшая ее часть относится к нелинейным системам.
В следующем году нашему институту исполняется 85 лет, и мы к этому юбилею готовим монографию, посвященную вопросам оптимизации и управления. В ней будет специальный раздел, посвященный связи этих дисциплин, — это одно из новых направлений деятельности нашей лаборатории, которое предполагает рассмотрение задач управления как задач оптимизации и приводит к очень неожиданным и интересным результатам.
Вообще, стоит сказать, что две науки — управление и оптимизация — до какого-то момента развивались совершенно независимо. Управление имело дело с регуляторами, устойчивостью, передаточными функциями, обратной связью и т.п. Оптимизация начиналась с вариационного исчисления, условий экстремума, потом возникло линейное и нелинейное программирование, затем методы оптимизации. В 1960-е гг. в управлении произошел большой поворот: появилась идея оптимизации, при этом стала видна их тесная связь, которая в последующие годы стала только усиливаться.
— Сейчас все боятся слова «оптимизация», оно себя немного дискредитировало. О чем в данном случае идет речь?
— Это оптимизация в сугубо математическом смысле. В простейшем случае у нас имеется некоторая функция, зависящая от тех или иных переменных. Мы хотим ее оптимизировать, то есть найти тот набор значений переменных, при которых она принимает свое наибольшее или наименьшее значение. Как правило, в практических задачах мы вынуждены накладывать дополнительные ограничения на возможные значения ее переменных, дополнительные условия, и в этом случае говорят о задачах условной оптимизации. Ведь в реальных задачах все величины имеют тот или иной физический смысл, интерпретацию, и они не могут принимать какие угодно значения.
— Как это может выглядеть применительно к машине или самолету? Приведите практический пример из жизни.
— У нас было очень интересное исследование по заказу наших коллег из ГосНИИАСа — Института авиационных систем. Нам было предложено решить такую задачу: пассажирский самолет летит из точки А в точку В, и он должен приземлиться в заданное время, не раньше, не позже, — иначе это приведет к экономическим потерям. Как, то есть на какой высоте и с какой скоростью, он должен лететь, чтобы при этом потратить наименьшее количество топлива? Иными словами, как построить то, что в авиационной науке называется «высотно-скоростным профилем полета»? Вот хороший пример задачи оптимизации. Причем трудной задачи: скорость и высота полета могут меняться в довольно узком диапазоне, масса самолета постоянно уменьшается в соответствии с расходом топлива, и это изменение для среднемагистрального самолета может быть существенным: при максимальной дальности полета масса потребляемого топлива может составлять более 30% общей массы самолета. Мы довольно долго обдумывали, можем ли мы взяться за эту задачу, и в какой-то момент поняли, что можем.
— Каким же образом вы ее решили?
— Здесь приходится моделировать решение системы дифференциальных уравнений с использованием аппроксимации удельного расхода топлива в зависимости от скорости, высоты и тяги, учитывая состояние атмосферы, силу и направление ветра… Сначала нам ставилась задача минимизации расхода топлива только на этапе крейсерского полета, то есть когда самолет уже набрал высоту. Потом добавился этап набора высоты, потом подключился и этап ее снижения. Оставшиеся два этапа — взлет и посадка — это особые этапы полета, где не так важна экономия, тут речь идет больше о безопасности. Так вот, оказалось, что те подходы, которые нам удалось разработать и предложить, приводят к экономии топлива, которая может достигать 3%.
— Это много?
— Да, экономия даже в доли процента уже экономически оправдана.
— Будет ли пассажирам комфортно, если самолет то и дело меняет высоту?
— Замечательно то, что самолету как раз не нужно постоянно менять скорость и высоту. Пассажирам это было бы крайне некомфортно, пилоту сложно, да и самолет на это не рассчитан. Оказывается, для среднемагистрального самолета — а это полет на расстояние порядка 5 тыс. км — нужно всего лишь пять-семь раз поменять высоту и скорость полета. Это и технически вполне реализуемо, и допустимо с точки зрения полетных норм, и совершенно незаметно для пассажиров. Ну и экономически приятно для авиакомпании. Вот пример того, как общая теория, связанная с решением задач оптимизации, может быть полезна для решения конкретных практических задач.
— Вы применяете в своей повседневной жизни эти знания и навыки? Оптимизируете свой жизненный процесс?
— Конечно, хотелось бы, чтобы это было так. Возможно, это происходит неосознанно. В любом случае те задачи, которыми мы занимаемся профессионально, безусловно, оказывают влияние и на нашу повседневную жизнь и ее восприятие.







































{kind=link}