

Осенью 2024 г. в МФТИ презентовали новый научный журнал «Нейротехнологии & нейроэлектроника», в котором будут собраны знания о мозге, электронике и их взаимодействии. Практическим результатом этих знаний должны стать роботы, подражающие животным, птицам и рыбам. В России их прототипы создают в МФТИ, Нижегородском государственном университете им. Н.И. Лобачевского в и БФУ им. Иммануила Канта.

Виктор Борисович Казанцев
Фото: Елена Либрик / Научная Россия
Зачем нужны биоморфные роботы, если уже, казалось бы, найдены эффективные решения? Как различается взгляд биологов и физиков на решенную задачу? Когда можно ждать создания искусственной мышцы и на чем она может быть основана? Об этом — в интервью с руководителем лаборатории нейробиоморфных технологий МФТИ Виктором Борисовичем Казанцевым.
― Казалось бы, инженеры и ученые нашли эффективные решения в области роботов и беспилотников ― и летающих, и плавающих, и наземных. Как говорит ваш коллега профессор РАН Р.В. Мещеряков: «Человек научился летать, когда перестал пытаться махать крыльями». Тем не менее сейчас ученые продолжают искать способы создания биоморфных роботов. Зачем они нужны?
― Вопрос многогранный, и причин несколько. Основная ― это энергетика. Для поддержки экономики современного мира требуется все больше энергии, даже на информационные процессы, я уже не говорю о технологических. Ученые выяснили: если, например, все жители Нью-Йорка одновременно сделают запрос в Chat GPT, то практически вся энергия, вырабатываемая в США, будет потрачена на генерацию ответов.
Поэтому вопросы энергоэффективности становятся приоритетными, в том числе и в технологиях производства различных устройств. Биоморфные решения для роботов оптимизированы по эффективности самой природой: это миллионы лет эволюции. В природе выживают только те организмы, которые приспособились и оптимизированы по эффективности. Хищники, бегающие, летающие и плавающие, должны догнать жертву, а жертва должна убежать от хищника… Все это — работа мышц и синергетическая биомеханика работы организма — и обеспечивает такую эффективность. Исходя из понимания фундаментальных принципов этой биомеханики, мы пытаемся создавать технические устройства, которые в идеале обладали бы такой же эффективностью в части энергетики.
Другая грань — возможности перемещения и маневренности биоморфов в естественных условиях без транспортной инфраструктуры. Например, шагающие роботы совсем не требовательны к дорогам. Сама инфраструктура дорог и возникла, в первую очередь, из-за того, что появилось колесо, которого нет в природе.
— Но надо ли нам создавать шагающих роботов, если эффективность колеса доказана веками?
— Все зависит от задач, которые необходимо решить. Если надо быстро переместить пассажиров или груз из точки А в точку Б, то сегодня при наличии дороги колесный транспорт будет эффективнее. Но если стоит задача передвижения по местности, где нет дорог, то преимущество получат биоморфные решения. Существуют биоморфные роботы, у которых уже сейчас есть определенный коммерческий успех, — это роботы-собаки. Кроме различных игровых приложений, они интересны тем, что это единственные роботы, которые умеют ходить по ступенькам и пересеченной местности. А значит, их возможно использовать, например, в экстремальных условиях, где человеку находиться опасно или невозможно, а колесный робот не проедет.
И еще одно важное преимущество биоморфных роботов: по предположению ученых, они должны приниматься природой и могут использоваться, например, для управления зооресурсами.
— В отличие от квадрокоптера робоптица не распугает стаю?
— Условно — да. Например, робот-птица-хищник может распугивать живых птиц в аэропортах: такая практика существует, например, в Нидерландах и Канаде. Конечно, можно завести для таких целей настоящего сокола, но в отличие от робоптицы мозг животного невозможно полностью контролировать.
Кроме того, большинство животных, рыб и птиц живут стаями. Теоретически можно использовать робота как ведущую особь, за которой пойдет вся стая. По моей информации, какое то время назад в США осуществили коммерческий проект: использовали робота-рыбу, чтобы уводить косяки рыб от места разлива нефтепродуктов. Поэтому такой опыт уже есть, и мы видим, что количество публикаций о различных биоморфных роботах в западных журналах растет в геометрической прогрессии.
Если кратко резюмировать, то мы видим преимущества биоморфных роботов в их энергоэффективности, новом функционале, которого нет у стандартных машин, и в их возможной интеграции в природу.

Фото: Елена Либрик / Научная Россия
— Насколько хорошо ученые сегодня знают биомеханику четвероногих животных, рыб и птиц?
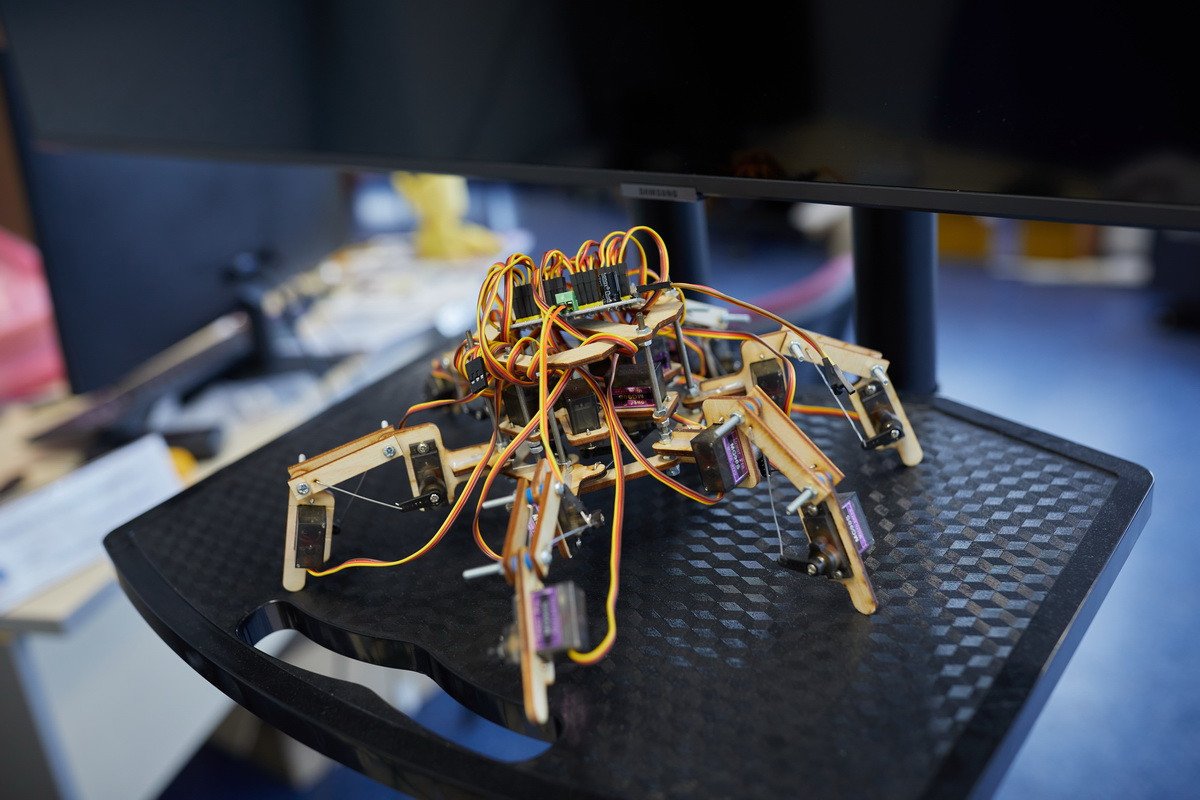
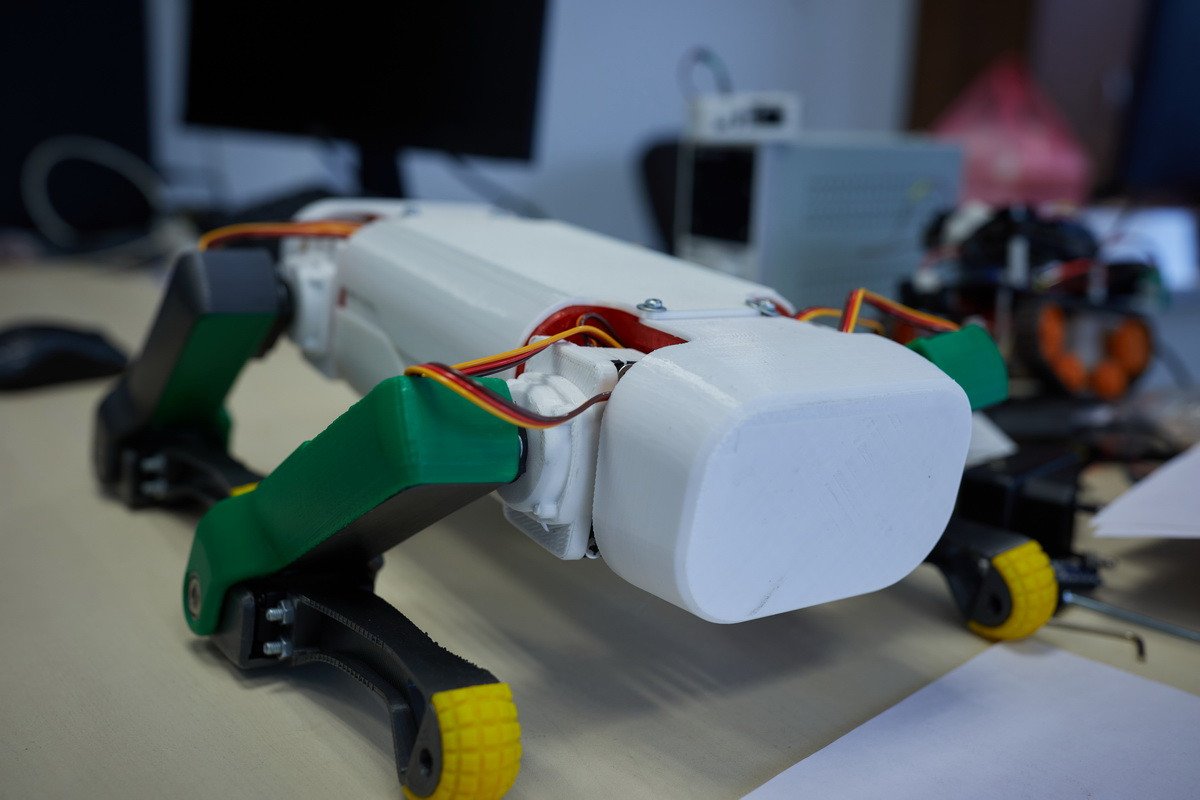
— С одной стороны, знаем мы довольно много: этими задачами занимается достаточное количество физиологов и биомехаников, в том числе и в России. Один из наших проектов посвящен роботу-собаке, и в будущем мы планируем создать биоморфную лапу. Дело в том, что если присмотреться, то у настоящих кошек и собак есть существенные отличия даже от самых современных их робопрототипов, а именно то, как двигаются и маневрируют живые существа. Это просто фантастика. Биомеханика животных очень сложная, и, хотя мы знаем, как работают и сокращаются мышцы и как идет сигнал управления, воспроизвести эти процессы очень сложно.
В свое время американский физиолог Рудольфо Льинас (Rodolfo Llinas) решил выяснить, какая вычислительная мощность требуется нашему мозгу, чтобы управлять мышцами. Например, когда мы берем предмет со стола, то это движение пальцев, а не всей руки. Но даже такое движение одновременно вовлекает около 50 групп мышц, которые независимо управляются нейронами. А по количеству степеней свободы существует 1015 возможных комбинаций — различных состояний этих 50 мышц. Для того чтобы искусственно путем перебора найти оптимальную комбинацию в режиме реального времени, потребуется компьютер с тактовой частотой 106 ГГц. Во-первых, это недостижимая вычислительная мощность, а во-вторых, потребуется безумное энергопотребление, чтобы обеспечить такое управление. Но мы все также видим, как мозг каждого из нас решает эту задачу всего на 10 Гц и при десятке ватт энергозатрат. Значит, существует другой принцип управления мышцами — нейроморфный. Такие задачи мы с молодыми учеными решаем в лаборатории нейробиоморфных технологий МФТИ. Нейроморфные технологии — это создание искусственного мозга, а биоморфные — создание тела, которым этот мозг будет управлять.
— И вы их объединяете?
— Объединить их и построить систему управления — это ключевая задача в биоморфной робототехнике. Речь пока не идет ни о когнитивных функциях, ни о техническом зрении. Это отдельная задача, которой мы тоже занимаемся, но в первую очередь надо научиться двигаться так, как двигаются животные.
Ограничений здесь достаточно много. Основная проблема в том, что пока не решена проблема искусственной мышцы. Существующие приводы, хоть и хороши и достаточно компактны, но все равно не способны обеспечить нужный функционал в сравнении с тем, что делают мышцы.
У нас есть эффективные решения в области искусственного интеллекта, материаловедения, движителей, но нет искусственной мышцы. Это пропущенное звено, и тот, кто первый ее создаст, откроет путь к решению важнейших задач, связанных с биоморфной робототехникой. А вершина биоморфной робототехники — это антропоморфные роботы.
— Искусственная мышца — это абсолютно иные принципы работы, чем существующие двигатели. На основе чего она может быть создана?
— Уже более 20 лет ученые пытаются создать искусственные мышцы на основе электрополимеров. Это полимеры, которые под действием электрического тока, напряжения меняют свою конформацию — например, способны изгибаться или растягиваться. К сожалению, пока задача не решена из-за того, что динамические диапазоны, мощности, которые создаются на электрополимерах, недостаточны для движения тяжелых конечностей.
Можно использовать биологический подход и попробовать вырастить мышцы в пробирке. В результате мы получим биологическую субстанцию, а для того, чтобы «поженить» ее с металлическими элементами, потребуется изобретать отдельные технологии.
Есть другой путь. Недавно на семинаре в лаборатории мои ученики разбирали статью 2023 г., в которой описывается создание прямого аналога мышцы с использованием наноэлектроники. Но для его работы требуется напряжение 800 В, а это значительная проблема для автономных устройств.
Создание искусственной мышцы — комплексная задача, и пока неизвестно, кто решит ее первым.
— Можете предположить, когда появятся эффективные результаты?
— С развитием нейронных сетей и машинного обучения прогресс движется очень быстро, поэтому существенного прорыва можно ожидать в перспективе пяти-десяти лет, а может и раньше. Теперь у нас есть возможность в разумное время решать задачи, которые раньше вообще считались нерешаемыми, и это еще один стимул возврата к биоморфным машинам, в том числе и к тем, которые машут крыльями и хвостами.
Но, конечно, никто не собирается отказываться от классических самолетов в пользу биоморфных решений. Ведь и в природе нет огромных птиц, которые переносят большие грузы. Для таких задач человеком создана самолетная схема, и она в полной мере обеспечивает потребности по доставке грузов и пассажиров на большие расстояния, хотя и требует сложной инфраструктуры — аэропортов.

Фото: Елена Либрик / Научная Россия
— Каких знаний о мозге вам не хватает для создания биоморфных роботов?
— Не хватает очень многого. Например, мы до сих пор не знаем, как организован моторный контроль в целом, хотя если спросить биологов, они ответят, что все знают. Дело в том, что понимание биолога отличается от понимания физика, а кроме того различается подход к условиям, при которых задача решена. Для меня как для человека с физическим образованием задача решена, если я понял, как работает тот или иной процесс, способен создать модель и показать это в эксперименте. А если кажется, что понимание есть, но сделать модель не получается, значит нет и понимания. У биологов же представление другое.
Когда я спрашиваю биологов: «Расскажите мне как физику, какой сигнал, управляющий 50 мышцами при движении пальцев, идет из мозга?» — ответа нет. Мне скажут, что да, идут какие-то импульсы. Но нельзя сказать инженеру «какие-то»…
— В условном проекте надо указать конкретные параметры…
— Естественно. Поэтому определенные знания у нас есть, но они не касаются высших функций.
Например, мы хорошо знаем, как устроен глаз и работает сетчатка. Но как только доходим до визуальной коры и процессов обработки визуальной информации, конкретных объяснений нет. Это ни в коем случае не претензия к биологам. Они говорят на своем языке и стоят на самом переднем крае исследований мозга, работая непосредственно с ним на разных уровнях: от генов, молекул до сетей и функций. Но я твердо стою на том, что с точки зрения биомеханики и управления движением животных комплексная задача биологами не решена. То есть они не знают, как летает птица или как плавает рыба. Соответственно, не знаем этого и мы.
— Поразительно, что за столько веков исследований все еще нет ответа…
— Если внимательно посмотреть на полет птицы — движение крыльев и то, как работают перья, — то даже невооруженным взглядом будет видно, что количество степеней свободы огромно. Это работа мышц, возможность движения костным скелетом, тонкие настройки, которыми управляют перья…
Движение рыб тоже сложное. Например, щука при атаке развивает колоссальное ускорение. Но как она это делает? Это не только синхронизация движений хвоста и плавников, но и определенное взаимодействие с жидкостью.
У птиц и рыб есть общая механика: например, когда рыба плывет, она разрезает воду, не создавая турбулентных вихрей, в отличие от работы винтов. Таким образом, рыбы адаптивно взаимодействуют со средой, оптимизируя энергетику, скоростные и маневренные характеристики.
— А у птиц подобная адаптивность выражается в том числе во взаимодействии с воздушными потоками?
— Именно.
— Возможно ли научить нейроморфную систему чувствовать воздушные потоки?
— Конечно, и мы однозначно планируем этим заниматься. Сейчас нам нужно немного времени, чтобы решить задачу полета робоптицы. Потом установим на нее различные сенсоры, в том числе давления, и будем обрабатывать эти сигналы. То есть, поймав воздушный поток, робот перестанет махать крыльями. А можно также найти решения по рекуперации энергии: когда двигатель начинает крутиться в обратную сторону, аккумулятор заряжается. Аналогичную механику можно использовать и нам, когда птица будет заходить на посадку и тормозить. Но надо понимать, что с каждым новым шагом задачи становятся все сложнее.
— Насколько успешно получается общаться с учеными смежных направлений? Или для того чтобы специалисты, особенно молодые, говорили на одном языке, нужны новые компетенции в образовании?
— Лично у меня таких проблем нет, я понимаю и медиков, и биологов за счет многолетнего опыта совместной работы над разными проектами.
Но кроме науки я преподаю и вижу определенные проблемы. Возможно, действительно имеет смысл создать синтетические специальности, которые лежали бы на стыке биологии и физики, биологии и математики, биологии и инженерии. В каком-то виде они формируются уже сейчас. Например, медицинская кибернетика, которая появилась достаточно недавно, или когнитивное моделирование — синтез нейронауки, математики и инженерии. Но все это не базовые образовательные программы, а спецкурсы.
Прежде чем создавать новые программы, надо понимать, где в будущем найдут применение такие специалисты. Если мы начнем выпускать манипуляторы, работающие как человеческая рука, то робототехникам надо будет добавлять курсы по биомеханике и физиологии. Поэтому надо идти от целеполагания и задач.






































{kind=link}